 जीडीयू
जीडीयू
 उफ्ली
उफ्ली डीजेआई
डीजेआई एमएमसी
एमएमसी जीडीयू
जीडीयू XAGName
XAGName AOLAN
AOLAN केल
केल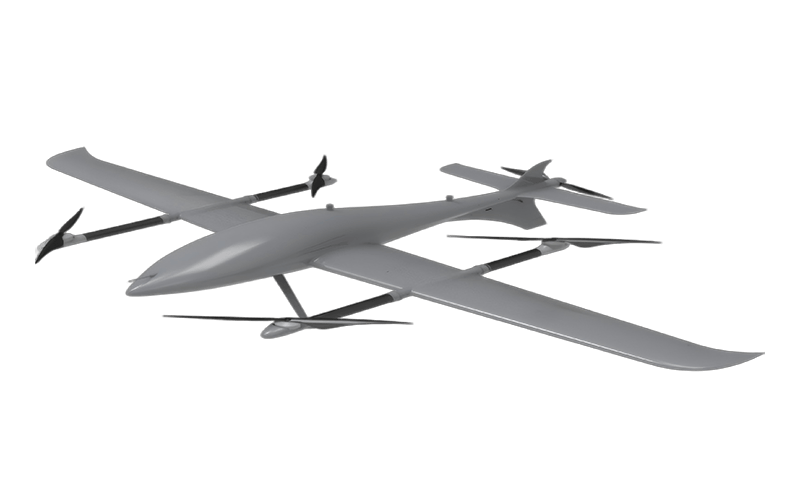 स्काई नेक्स्ट
स्काई नेक्स्ट- DJI Matrice-4T का थप वस्तुहरू
- DJI Matrice 4E ड्रोन
- DJI म्याट्रिस ४TD
- DJI म्याट्रिस ३०T
- DJI Mavic 3 Emterprise
- DJI Mavic 3M मल्टिस्पेक्ट्रल ड्रोन
- DJI RC 2 Plus Industry Plus का थप वस्तुहरू
- DJI Matrice 4 श्रृंखला ब्याट्री
- DJI Matrice 4D श्रृंखला ब्याट्रीहरू
- TB65 इन्टेलिजेन्ट फ्लाइट ब्याट्री
- TB100 स्मार्ट उडान ब्याट्री
- WB37 ब्याट्री
- DJI सामानहरू
- AL4-20 को लागि सोधपुछ पेश गर्नुहोस्, हामी तपाईंलाई 24 घण्टामा सम्पर्क गर्नेछौं।
- AL4-22 को लागि सोधपुछ पेश गर्नुहोस्, हामी तपाईंलाई 24 घण्टामा सम्पर्क गर्नेछौं।
- AL4-30 को लागि सोधपुछ पेश गर्नुहोस्, हामी तपाईंलाई 24 घण्टामा सम्पर्क गर्नेछौं।
- AL6-30 को लागि सोधपुछ पेश गर्नुहोस्, हामी तपाईंलाई 24 घण्टामा सम्पर्क गर्नेछौं।
- AL4-50 को लागि सोधपुछ पेश गर्नुहोस्, हामी तपाईंलाई 24 घण्टामा सम्पर्क गर्नेछौं।

ड्र्यागनफिस स्ट्यान्डर्ड: नेक्स्ट-जेन मल्टी मिसन eVTOL
ड्र्यागनफिस मानक बहुमुखी बहु-मिसन eVTOL UAV
औद्योगिक र सार्वजनिक सुरक्षा अनुप्रयोगहरूको लागि सन्तुलित सहनशीलता, पेलोड लचिलोपन र द्रुत तैनाती

ड्र्यागनफिस मानक बहुमुखी बहु-मिसन eVTOL UAV
औद्योगिक र सार्वजनिक सुरक्षा अनुप्रयोगहरूको लागि सन्तुलित सहनशीलता, पेलोड लचिलोपन र द्रुत तैनाती
मौन उडान
ड्र्यागनफिसले आफ्नो असाधारण प्रणोदन प्रणाली र नवीन आवाज घटाउने डिजाइन मार्फत अति-मौन उडान हासिल गर्छ। ४०० फिट (१२० मिटर) AGL* माथि मुश्किलले सुन्न सकिने, DF ले सञ्चालन गोपनीयता सुनिश्चित गर्दै पत्ता लगाउने जोखिमलाई उल्लेखनीय रूपमा कम गर्छ।
थप जान्नुहोस् >>

मौन उडान
ड्र्यागनफिसले आफ्नो असाधारण प्रणोदन प्रणाली र नवीन आवाज घटाउने डिजाइन मार्फत अति-मौन उडान हासिल गर्छ। ४०० फिट (१२० मिटर) AGL* माथि मुश्किलले सुन्न सकिने, DF ले सञ्चालन गोपनीयता सुनिश्चित गर्दै पत्ता लगाउने जोखिमलाई उल्लेखनीय रूपमा कम गर्छ।
थप जान्नुहोस् >>
सुपीरियर एन्टी-हस्तक्षेप
जटिल वातावरणमा, UAV ले असाधारण सञ्चार र भिडियो प्रसारण प्रदर्शन कायम राख्छ, बलियो एन्टी-हस्तक्षेप क्षमताहरू र स्थिर, भरपर्दो प्रसारणको विशेषता राख्छ।

सुपीरियर एन्टी-हस्तक्षेप
जटिल वातावरणमा, UAV ले असाधारण सञ्चार र भिडियो प्रसारण प्रदर्शन कायम राख्छ, बलियो एन्टी-हस्तक्षेप क्षमताहरू र स्थिर, भरपर्दो प्रसारणको विशेषता राख्छ।
पेशेवरहरूले किन ड्र्यागनफिस मानक रोज्छन्?

GNSS नोक्सान सुरक्षा
गैर-GNSS वातावरणमा सञ्चालन गर्दा, UAV ले अवतरण सुरक्षा सक्रिय गर्दछ, सुरक्षा सुनिश्चित गर्न स्वचालित रूपमा यसको हालको स्थितिबाट तल झर्छ।
कम ब्याट्रीको प्रतिफल
प्रयोगकर्ताहरूले अपेक्षित अवतरण ब्याट्री स्तर अनुकूलित गर्न सक्छन्। UAV ले हालको ब्याट्री स्तर र उडान स्थितिको आधारमा वास्तविक समयमा इष्टतम फिर्ता समय गणना गर्दछ, जसले गर्दा यो प्रयोगकर्ता-परिभाषित थ्रेसहोल्डको नजिक ब्याट्री स्तरमा अवतरण हुन्छ।
हराएको संकेत फिर्ता
यदि UAV र ग्राउन्ड स्टेशन बीचको सिग्नल अवरुद्ध भयो भने, जडान गुमाउने सुरक्षा सक्रिय हुन्छ। यदि GNSS सिग्नलहरू उपलब्ध छन् भने, UAV ले स्वचालित रूपमा घर फर्कन सुरु गर्छ।
आपतकालीन म्यानुअल ओभरराइड
आपतकालीन अवस्थामा, तपाईंले उडान सुरक्षा सुनिश्चित गर्दै तुरुन्तै म्यानुअल नियन्त्रण लिनको लागि जुनसुकै बेला रिमोट कन्ट्रोलरलाई M मोडमा स्विच गर्न सक्नुहुन्छ।

धेरै रिडन्डन्सीहरू, मिसन सुरक्षा सुनिश्चित गर्दै
eVTOL ले प्रमुख कम्पोनेन्टहरू (ब्याट्री, सेन्सर, सञ्चार बसहरू) र स्वायत्त मोड स्विचिङमा बहु-स्तरीय रिडन्डन्सीहरू समावेश गर्दछ, जसले जटिल वातावरणमा पनि स्थिर उडान र भरपर्दो कार्यसम्पादन सुनिश्चित गर्दछ।
एक-ट्याप आत्म-जाँच
प्रत्येक उडान सुरक्षित र भरपर्दो छ भनी सुनिश्चित गर्दै, उडान सुरु गर्नु अघि स्वचालित रूपमा प्रणाली जाँच गर्दछ।
एक-बटन रिटर्न
गृह बटन मार्फत सजिलै घर फर्कनुहोस्। सुविधाजनक भण्डारण: उडान पछि छिटो व्यवस्थित, भण्डारण गर्न सजिलो र अर्को प्रयोगको लागि तयार।
बुद्धिमान ट्र्याकिङ
UAV ले आफ्नो लक्ष्यमा लक गर्न सक्छ र लचिलो रूपमा आफ्नो उडान मार्ग समायोजन गर्न सक्छ। धेरै ट्र्याकिङ मोडहरूलाई समर्थन गर्दछ।

मोबाइल प्लेटफर्म टेकअफ र ल्यान्डिङ
चलिरहेको प्लेटफर्महरूमा टेकअफ र अवतरणलाई समर्थन गर्दछ।
ड्र्यागनफिस ड्र्यागनफिस स्ट्यान्डर्डको विशिष्टताहरू
| निर्दिष्टीकरण | विवरणहरू |
| प्रकारहरू | टिल्ट-रोटर मल्टी-मिसन eVTOL UAV |
| आयामहरू | १९४८ × ३२९५ × ५२० मिमी (प्रोपेलरहरू सहित) |
| तौल | ७.५ किलोग्राम (२ वटा ब्याट्री, प्रोपेलरहरू सहित; गिम्बल पेलोड बाहेक) |
| अधिकतम पेलोड क्षमता | १.५ किलो |
| अधिकतम उडान समय | १२६ मिनेट (मानक पेलोड कन्फिगरेसनको साथ) |
| अधिकतम तेर्सो गति | १२० किमी/घण्टा |
| अधिकतम तेर्सो गति | १२६ किमी/घण्टा (३५ मिटर/सेकेन्ड) |
| अधिकतम हावा प्रतिरोध | १५ मिटर/सेकेन्ड (फिक्स्ड-विङ मोड), १२ मिटर/सेकेन्ड (ठाडो उडान मोड) |
| अधिकतम सेवा सीमा | समुद्र सतहबाट ५००० मिटर माथि |
| सञ्चालन तापमान | -२०°C देखि ५०°C सम्म |
| IP मूल्याङ्कन | IP43 को लागि सोधपुछ गर्नुहोस् |
| GNSS समर्थन | GPS + GLONASS + BeiDou + Galileo (बहु-नक्षत्र स्थिति) |
| अधिकतम सिग्नल प्रसारण दायरा | ३० किमी |
| तैनाथी समय | ≤५ मिनेट (उपकरणरहित द्रुत-रिलीज एसेम्बली) |
आकार तुलना

सामानहरू

ड्र्यागनफिस ग्राउन्ड स्टेशन

Autel स्मार्ट एन्टेना ट्रान्समिशन (ASAT) (वैकल्पिक)

Autel Dragonfish Nest (वैकल्पिक)

ड्र्यागनफिस रिपीटर (वैकल्पिक)
अनुकूलन उत्पादन

तटीय तस्करी विरोधी

प्रहरी प्रवर्तन

वन डढेलो रोकथाम

विद्युत लाइन निरीक्षण

ट्राफिक निरीक्षण




